前言
Centernt 推荐的环境是 16.04 + pytorch 0.4.1 + CUDA 0.9.0 等,按照官方文档在 18.04 环境上安装就会出现一系列问题,
CUDA & CUDNN
CUDA 的版本不是很重要,但是需要与 GPU driver 的版本相符,可以查看 GPU Driver 的版本
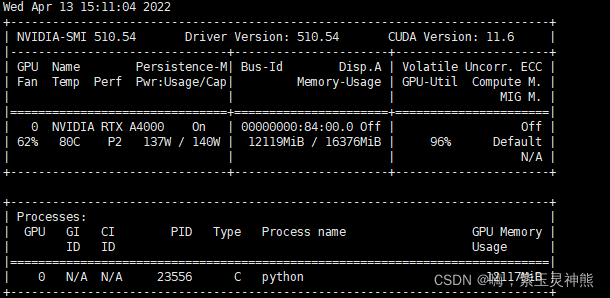
GPU Driver
查看服务器显卡驱动,如图所示,右上角为 CUDA 支持的最高版本,如果显示其他信息,则显卡驱动存在问题,可以重新安装显卡驱动,显示无误则可以安装 CUDA 了。
nvidia-smi
CUDA
按照前可以先检查当前环境下是否已经存在 cuda ,通过检查 nvcc 来实现。
nvcc -V
根据机器的 GPU Driver 到官网选择对应的版本后,会出现如图界面,按照提示下载安装即可,推荐 runfile 文件,其余的 installer type 需要较好的网络条件。
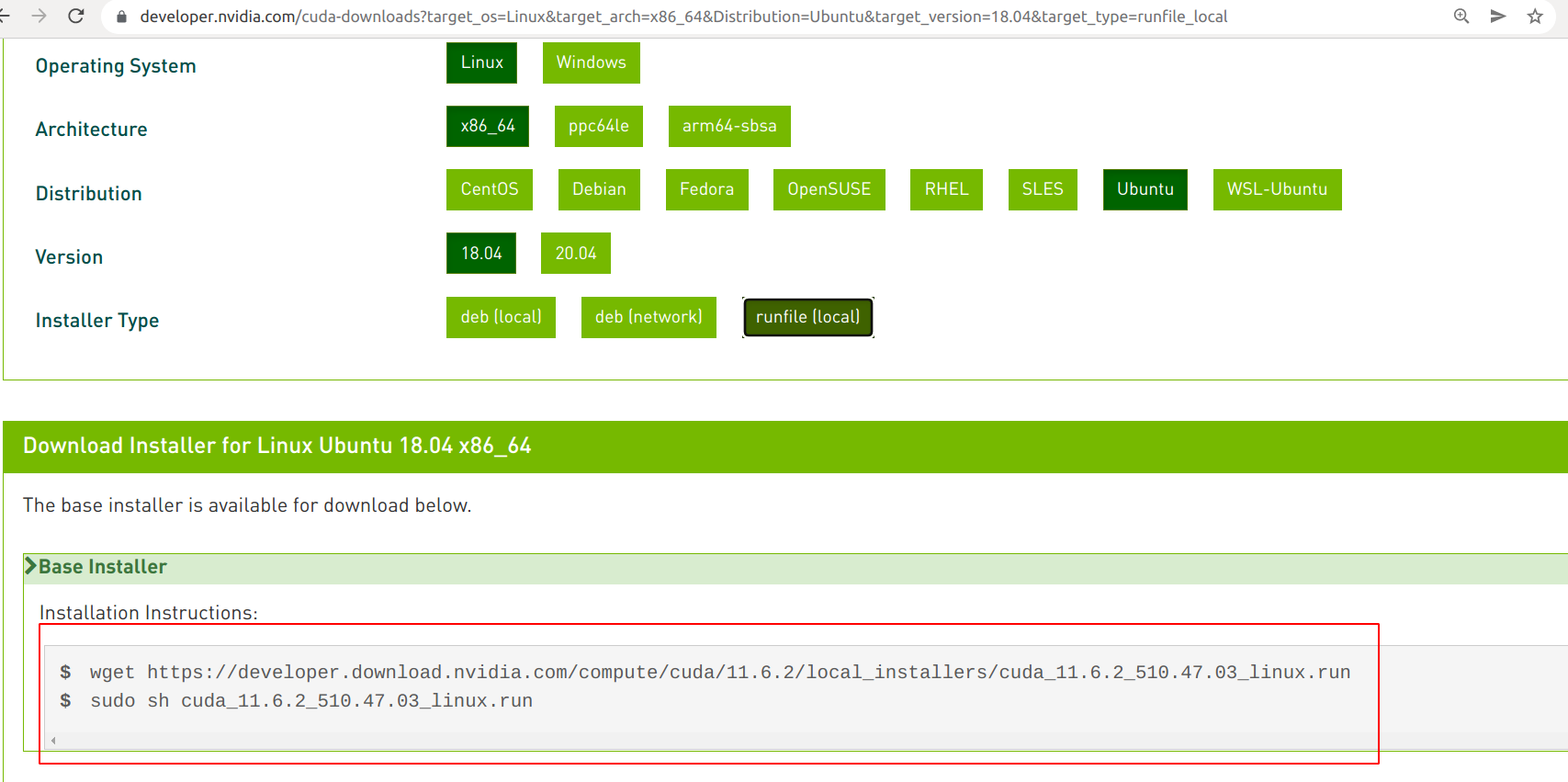
如需自定义安装路径,需要在 options 选项中进行修改,路径为绝对路径。安装完成后在
.bashrc中导入环境变量,修改后source ~/.bashrc即可。
export PATH="/media/hy/AI/cuda-11.4/bin:$PATH"
export LD_LIBRARY_PATH="/media/hy/AI/cuda-11.4/lib64:$LD_LIBRARY_PATH"
安装完成后可以简单的验证一下,命令行输入 nvcc -V ,如果返回版本及其他信息则安装成功。
CUDNN
安装 cudnn 有很多方法,网上多推荐 deb 安装,本人选择 deb 没有成功,而是用 tgz 文件安装成功了。cuda 的版本应该与 CUDNN 相同,在官网上可以查看,这里选择 CUDA 11.4,对应的 cuDNN 选择 8.4 版本。
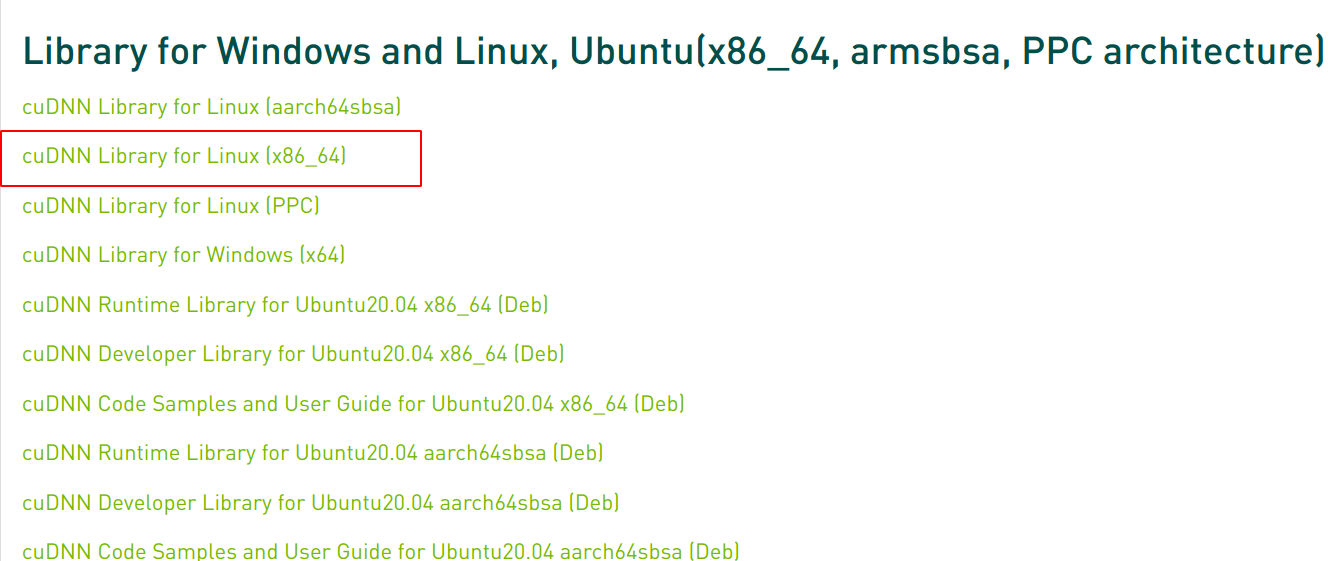
解压缩 tgz 会得到一个 cuda 文件夹,然后将一些文件拷贝到 cuda 文件夹下,赋予相关权限,至此 cuda 和 cudnn 安装完成。
tar -xzvf cudnn_xxx.tgz
sudo cp cuda/include/cudnn.h /usr/local/cuda-11.3/include
sudo cp cuda/lib64/libcudnn* /usr/local/cuda-11.3/lib64
sudo chmod a+r /usr/local/cuda-11.3/include/cudnn.h /usr/local/cuda-11.3/lib64/libcudnn*
conda control editions
单独创建一个虚拟环境来使用 centernet ,python 版本选择 3.6 。
conda create -n centernrt python=3.6
conda activate centernet
pytorch 1.7
官方文档使用 torch 0.4.1 ,这里改用 torch 1.7.0 ,网上绝大多数方法选择 conda 来安装,但存在一些问题,速度很慢,最后还会有问题。选择 pip 安装很快还没问题。
pip install torch1.7.1 torchaduio0.4.0 torchvision==0.8.0 -i https://pypi.douban.com/simple
clone centernet
基本环境配置完成后,下载 centernet,使用 pip 批量安装环境要求,同样的可以对 pip 换源。
git clone https://github.com/xingyizhou/CenterNet
cd CenterNet
pip install -r requirements.txt
DCNv2
绝大多数错误发生在此处,从 demo 到 main ,官方环境下的 DCNv2 版本适用于 torch 0.4 ,需要下载最新的 DCNv2 进行替换,替换路径为 Centernet/src/lib/models/networks ,然后执行命令
cd CenterNet/src/lib/models/networks/DCNv2
python setup.py build develop
NMS
编译 NMS 可以多尺度的测试 ExtremeNet 。
cd CenterNet/src/lib/external
make
demo 测试
测试 demo 前需要提前下载模型文件(密码eixi),将模型放置在 models 文件夹下。
python main.py ctdet --exp_id coco_dla --batch_size 32 --master_batch 15 --lr 1.25e-4 --gpus 0
训练数据
demo 测试验证无误后可以尝试自己训练数据,根据官方给出的 GET_STARTED 文档进行,同样的使用 coco 数据集来实现,在
onnx
在实现 pth 转 onnx 的过程中发现不支持 DCNv2 模块,尝试了很多方法,最后只能切换 backbone 类型为 Res18 ,在 demo 文件下进行转换,成功得到 onnx 文件。
from __future__ import absolute_import
from __future__ import division
from __future__ import print_function
import _init_paths
import torch
import os
import cv2
import sys
from opts import opts
from detectors.detector_factory import detector_factory
sys.path.append('/home/dhx/hy/model/CenterNet-master/src')
image_ext = ['jpg', 'jpeg', 'png', 'webp']
video_ext = ['mp4', 'mov', 'avi', 'mkv']
time_stats = ['tot', 'load', 'pre', 'net', 'dec', 'post', 'merge']
def demo(opt):
os.environ['CUDA_VISIBLE_DEVICES'] = opt.gpus_str
opt.debug = max(opt.debug, 1)
Detector = detector_factory[opt.task]
detector = Detector(opt)
#print('===>',detector.model)
imgsz = (512, 512)
# # Eval mode
# model.to(opt.device).eval()
# # Fuse Conv2d + BatchNorm2d layers
# # Export mode
# #model.fuse()
img = torch.zeros((1, 3) + imgsz) # (1, 3, 512, 512)
img = img.to(opt.device)
# #f = opt.weights.replace(opt.weights.split('.')[-1], 'onnx') # *.onnx filename
f = 'car_keypoint.onnx'
torch.onnx.export(detector.model, img, f, verbose=True, opset_version=9,
input_names=['images'], output_names=['hm', 'wh', 'hps', 'reg', 'hm_hp', 'hp_offset'],dynamic_axes=None)
#
# # Validate exported model
# import onnx
# model = onnx.load(f) # Load the ONNX model
# onnx.checker.check_model(model) # Check that the IR is well formed
# print(onnx.helper.printable_graph(model.graph)) # Print a human readable representation of the graph
# return
if __name__ == '__main__':
opt = opts().init()
demo(opt)